 ภาษาไทย
ภาษาไทย English
English Español
Español  русский
русский  Français
Français  Deutsch
Deutsch  tiếng Việt
tiếng Việt  Nederlands
Nederlands  magyar
magyar  हिन्दी
हिन्दी  Türkçe
Türkçe  العربية
العربية  український
український  فارسی
فارسی 

โซลูชั่นของมอเตอร์ปรับมุมเบาะรถยนต์
1. ด้วยระดับที่เพิ่มขึ้นของปัญญาประดิษฐ์/การใช้พลังงานไฟฟ้าของรถยนต์ การออกแบบตามสถานการณ์ต่างๆ ไม่สามารถแยกออกจากการปรับเบาะอัจฉริยะได้ และหนึ่งในฮาร์ดแวร์ที่สำคัญที่สุดสำหรับการปรับเบาะอัจฉริยะก็คือมอเตอร์ที่ปรับได้

2. มอเตอร์ทั่วไปสำหรับการปรับมุมพนักพิงคือมอเตอร์ทดรอบหลักและรอง ความแตกต่างที่ใหญ่ที่สุดระหว่างมอเตอร์ทั้งสองประเภทคือแรงบิดเอาท์พุตแตกต่างกัน โดยทั่วไปแรงบิดของมอเตอร์ทดรอบทุติยภูมิจะมากกว่าแรงบิดของมอเตอร์ทดรอบปฐมภูมิ
3. แผนภาพส่วนกระบวนการของมอเตอร์ปรับมุมแสดงไว้ด้านล่าง
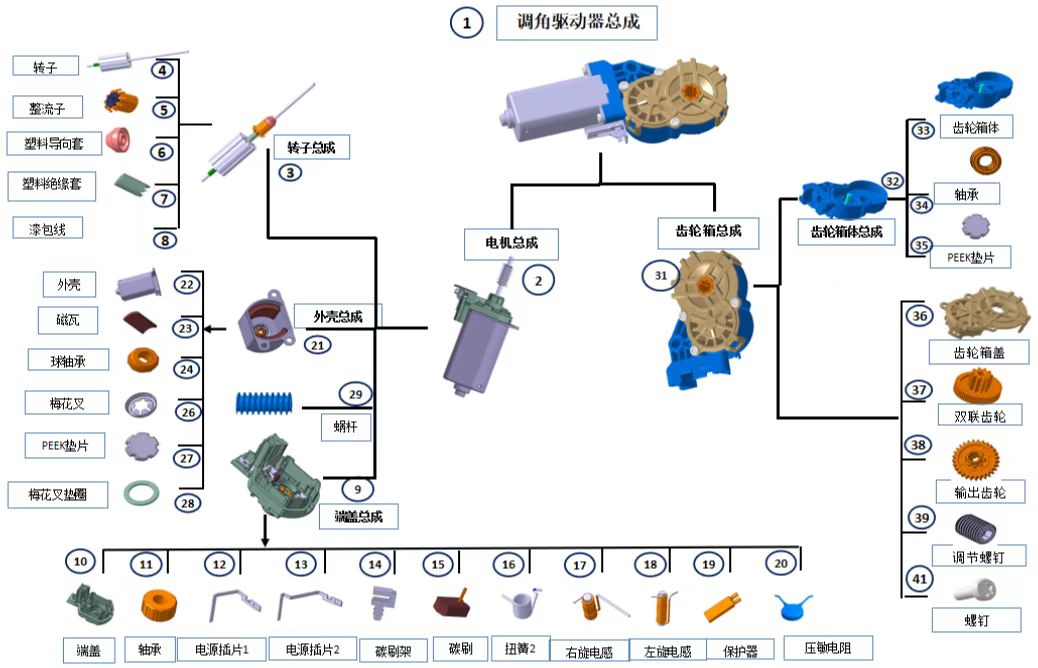
4. ชุดมอเตอร์ปรับมุมประกอบด้วย 6 ส่วน
1 ชิ้นส่วนโรเตอร์ = การติดตั้งแบบกด + การพันลวด + การเชื่อมจุด + การทดสอบ
② ตัวตัวเรือน = ตัวตัวเรือน + กระเบื้องแม่เหล็ก + ตลับลูกปืน + ส้อม Torx
3. ส่วนประกอบฝาท้าย = แบริ่ง + แปรงคาร์บอน + ตัวป้องกัน + วาริสเตอร์
④ ชิ้นส่วนตัวหนอน
⑤ ชุดมอเตอร์ = โรเตอร์ + ตัวเรือน + ฝาครอบปลาย + ตัวหนอน
⑥ ชุดกระปุกเกียร์ = เกียร์เอาท์พุต + เกียร์คู่ + แบริ่ง + สกรู
⑦ ชุดมอเตอร์ปรับมุม = ชุดมอเตอร์ + ชุดเกียร์
5. รู้เบื้องต้นเกี่ยวกับสายการผลิต
1) การผลิตแบบอัตโนมัติเต็มรูปแบบ ไม่ได้มาตรฐาน และปรับแต่งได้
2 มากกว่า 400 ชิ้นต่อชั่วโมง
3 สายการผลิตได้รับการปรับแต่งตามกระบวนการของลูกค้า และวัสดุจะถูกถ่ายโอนระหว่างกระบวนการโดยอัตโนมัติ
④ ส่วนประกอบที่สำคัญมาพร้อมกับฟังก์ชันการตรวจจับ
⑤ จำนวนพนักงาน 6 คน
2. มอเตอร์ทั่วไปสำหรับการปรับมุมพนักพิงคือมอเตอร์ทดรอบหลักและรอง ความแตกต่างที่ใหญ่ที่สุดระหว่างมอเตอร์ทั้งสองประเภทคือแรงบิดเอาท์พุตแตกต่างกัน โดยทั่วไปแรงบิดของมอเตอร์ทดรอบทุติยภูมิจะมากกว่าแรงบิดของมอเตอร์ทดรอบปฐมภูมิ
3. แผนภาพส่วนกระบวนการของมอเตอร์ปรับมุมแสดงไว้ด้านล่าง
4. ชุดมอเตอร์ปรับมุมประกอบด้วย 6 ส่วน
1 ชิ้นส่วนโรเตอร์ = การติดตั้งแบบกด + การพันลวด + การเชื่อมจุด + การทดสอบ
② ตัวตัวเรือน = ตัวตัวเรือน + กระเบื้องแม่เหล็ก + ตลับลูกปืน + ส้อม Torx
3. ส่วนประกอบฝาท้าย = แบริ่ง + แปรงคาร์บอน + ตัวป้องกัน + วาริสเตอร์
④ ชิ้นส่วนตัวหนอน
⑤ ชุดมอเตอร์ = โรเตอร์ + ตัวเรือน + ฝาครอบปลาย + ตัวหนอน
⑥ ชุดกระปุกเกียร์ = เกียร์เอาท์พุต + เกียร์คู่ + แบริ่ง + สกรู
⑦ ชุดมอเตอร์ปรับมุม = ชุดมอเตอร์ + ชุดเกียร์
5. รู้เบื้องต้นเกี่ยวกับสายการผลิต
1) การผลิตแบบอัตโนมัติเต็มรูปแบบ ไม่ได้มาตรฐาน และปรับแต่งได้
2 มากกว่า 400 ชิ้นต่อชั่วโมง
3 สายการผลิตได้รับการปรับแต่งตามกระบวนการของลูกค้า และวัสดุจะถูกถ่ายโอนระหว่างกระบวนการโดยอัตโนมัติ
④ ส่วนประกอบที่สำคัญมาพร้อมกับฟังก์ชันการตรวจจับ
⑤ จำนวนพนักงาน 6 คน
ส่งคำถาม

X
เราใช้คุกกี้เพื่อมอบประสบการณ์การท่องเว็บที่ดีขึ้น วิเคราะห์การเข้าชมไซต์ และปรับแต่งเนื้อหาในแบบของคุณ การใช้ไซต์นี้แสดงว่าคุณยอมรับการใช้คุกกี้ของเรา
นโยบายความเป็นส่วนตัว